この前は、「360度VR画像(パノラマ写真)の基本 ・エクイレクタングラー図法」と題して、最近のVRの根っこにあたる話を書きました。今回からはしばらく、「具体的な作り方」の話を書きます。本記事は、一眼レフカメラによるVR画像(パノラマ写真)の撮影の仕方をご紹介します。
2018年8月現在、VR用のカメラはもう把握しきれないくらいたくさん製品化されています。誰でもボタンひとつで高解像度の360°パノラマ写真が撮影できますし、YoutubeやFacebookで共有できます。高画質を売りにしたプロ向けのものから、手軽さが魅力の小型カメラまで様々です。そうしたカメラの中で特に良いものについてはどこかで別途ご紹介したいと思いますが、今日はカメラの話ではなく「一眼レフカメラによる撮影方法」です。簡単に撮影できるVRカメラがたくさんあるのに、なぜ面倒な方法を紹介するのかというと、VR画像(パノラマ写真)は一眼レフで撮影・制作するのが一番キレイだからです。また、撮影や合成(スティッチ)の方法は、実写VR全般で役に立つ知識でもあります。
VR画像(パノラマ写真)を撮影するために必要な機材
撮影に必要な機材は、以下の通りです。
- ・一眼レフカメラ
- ・魚眼レンズ
- ・パノラマ雲台:Nodal NINJA
- ・三脚:耐荷重10Kg以上のもの
カメラとレンズ
最終的なエクイレクタングラー形式のVR画像(パノラマ写真)の画質・解像度は、一眼レフカメラの性能(とカメラマンの腕)に依存します。元の写真の解像度が高ければ、VR画像の解像度も高いものが出力できます。フルサイズのカメラを使えば、8mmのレンズで「円周魚眼」の写真が撮れます。APCサイズのカメラであれば8mmのレンズで「対角線魚眼」の写真になります。画質・解像度ともにフルサイズの方が有利ですが、一般的な用途のVR画像(パノラマ写真)であれば、どちらでも大丈夫です。
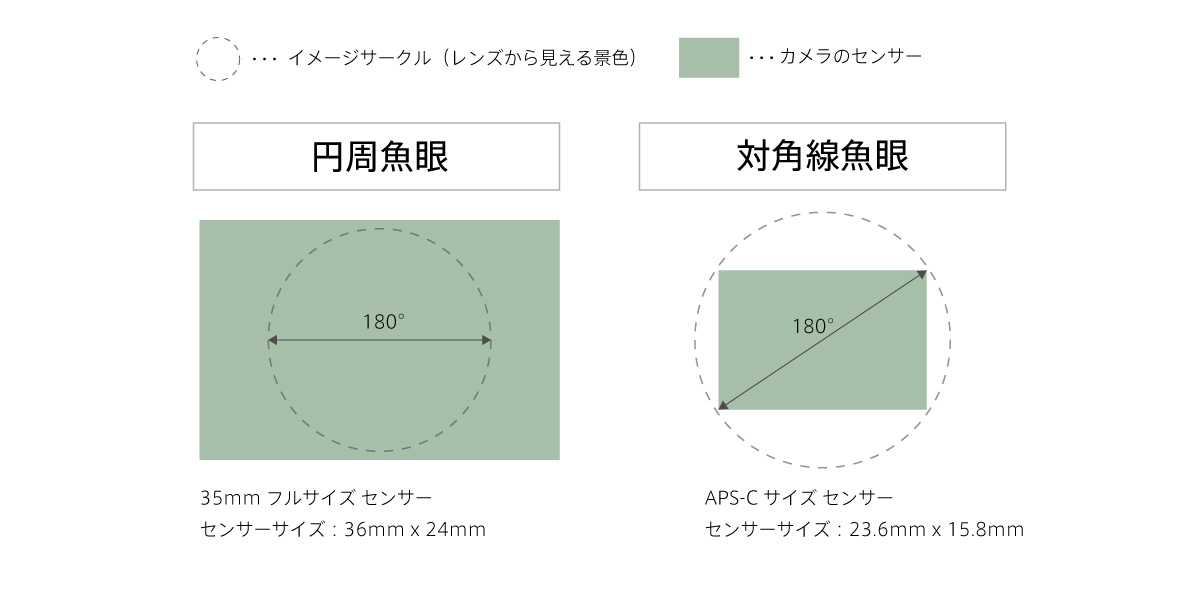
円周魚眼と対角線魚眼
上記は円周魚眼と対角線魚眼の違いです。8mmの魚眼レンズを使う場合、レンズを通してセンサーに投影される映像は円形となり、カメラの前方半分となる180°が収まります。フルサイズであれば、レンズを通して見える風景全てがセンサーに収まりますが、APS-Cサイズだとセンサーからはみ出してしまいます。フルサイズでは撮像される円形の直径の中に180°が収まるので円周魚眼、APC-Cサイズはセンサーの対角線に180°が収まるので対角線魚眼と言います。
レンズは魚眼レンズを使うのが一番効率的です。8mmだと理論的には最低3枚の写真から1枚のVR画像(パノラマ写真)を制作できます。通常は4枚(90°ずつ4角度)から6枚(60°ずつ6角度)の写真を撮影して合成することが多いようです。
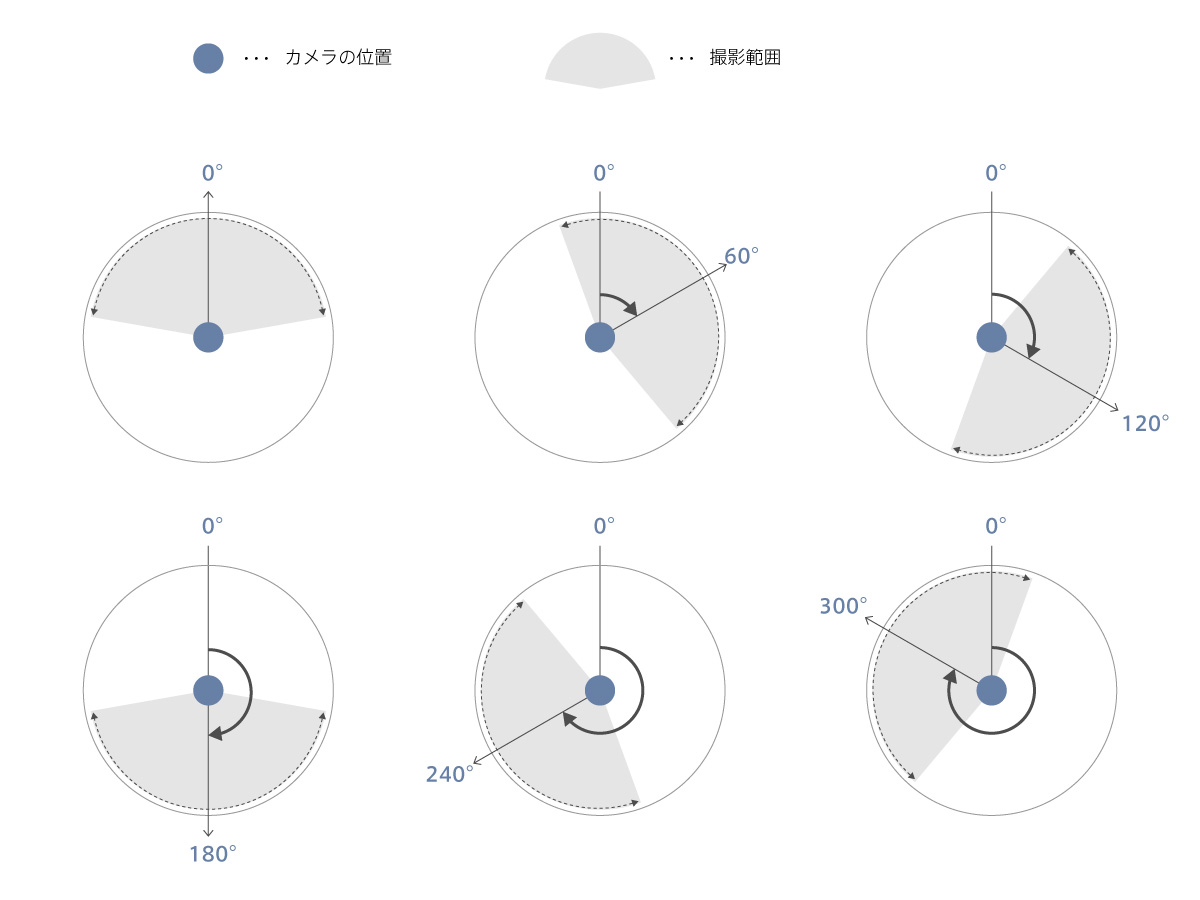
カメラのセンサーを中心に回転させながら複数枚の写真を撮る。6枚(60°ずつ6角度)の場合。
余談ですが、ギガピクセルパノラマと呼ばれる超高解像度のパノラマ写真を制作するケースなどで、広角レンズや標準レンズ、ズームレンズなどを使うこともあります。そうした場合には数十枚から数百枚、場合によっては数千枚の写真を撮ることもあります。
雲台と三脚
パノラマ雲台は、Nodal NINJAというメーカーの、パノラマ撮影専用の雲台+リグを使います。近年発売されているVR(やパノラマ)専用のカメラを使わない場合、パノラマ雲台は必須でメーカーはNodal NINJAほぼ一択となります。カメラの大きさや重さによって、機種を選びます。日本国内での購入は長年Nodal NINJA製品を取り扱っているよしみカメラさんがおすすめです。

Nodal Ninja 6。よしみカメラさんサイトより
三脚は、カメラと雲台が載ればなんでもOKです。ただ、VRの撮影ではカメラマンがカメラから離れて撮影するケースも多いので、可動部が動いたり倒れたりしないように頑丈で安定感のあるものが良いと思います。
ノーダルポイントの確認
360°VR画像(パノラマ写真)の撮影でもっとも重要なのがノーダルポイント(Nodal Point)の確認です。ノーパララックスポイント(No-Parallax Point)とも呼ばれます。日本語だと「ゼロ視差点」と言います。
ノーダルポイントは、レンズから取り込まれた光(映像)がセンサーに届く間の「節点(Node)」のことで、像を結ぶ場所です。この点を中心にカメラを回転させないと、角度を変えて撮影した各写真の間で違う写り方をしてしまうため、綺麗に合成ができなくなってしまいます。
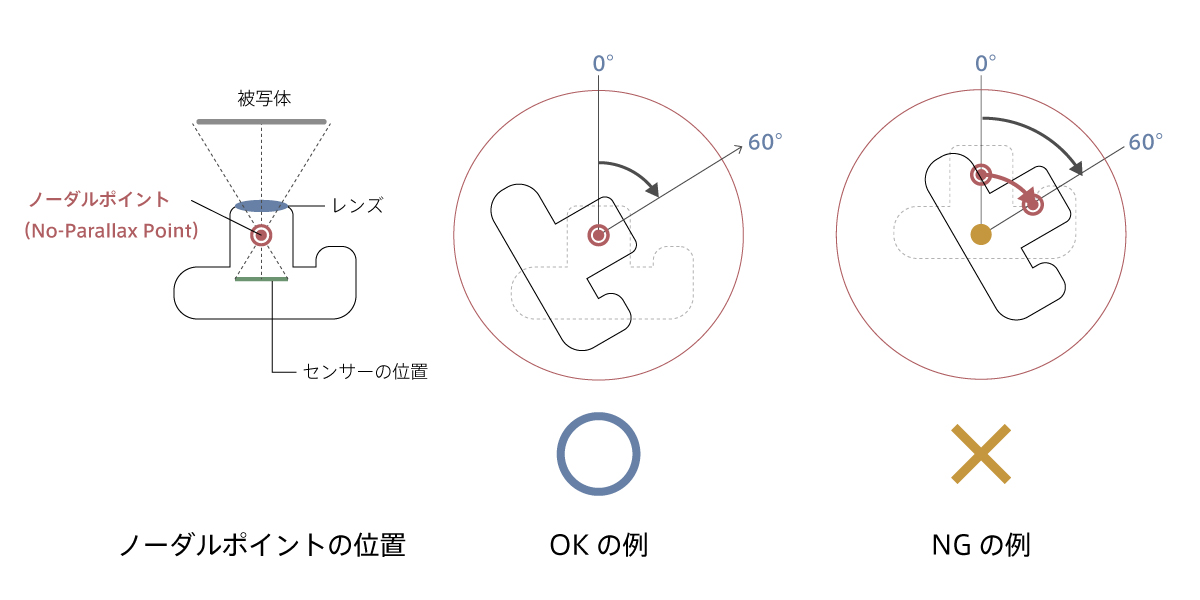
ノーダルポイントの位置と回転の仕方
左右の目を、片方ずつつぶって物を見てみると、見え方が違います。近くにあるほど、違いは顕著です。360°VR画像(パノラマ写真)では、複数枚の写真を合成するわけですから、それぞれ違ったものが映っていたらうまく繋がらなくなってしまいます。パノラマ写真で「うまく合成ができない」とき、この「ノーダルポイントがずれている」「撮影中にずれてしまった」というのが原因として一番多いです。
ノーダルポイントは、使うレンズによって場所が変わってきます。確認するには、実際にカメラをセットして、ファインダーを覗きます。パノラマ雲台(Nodal Ninja)を使って左右にカメラを振ったとき、見え方が変わらないかどうかを確認します。カメラから見て、重なり合う複数の物体に注目すると分かりやすいです。ある角度では手前の物体に隠れて見えなかった奥の物体が、別の角度からはチラッと見えている。そんな時はノーダルポイントがずれています。角度を変えても、重なり合った物体の見え方が変わらない、そういうポイントが見つかるまで、パノラマ雲台のメモリを調整します。例えば以下のような位置関係でカメラと鉛筆を並べます。
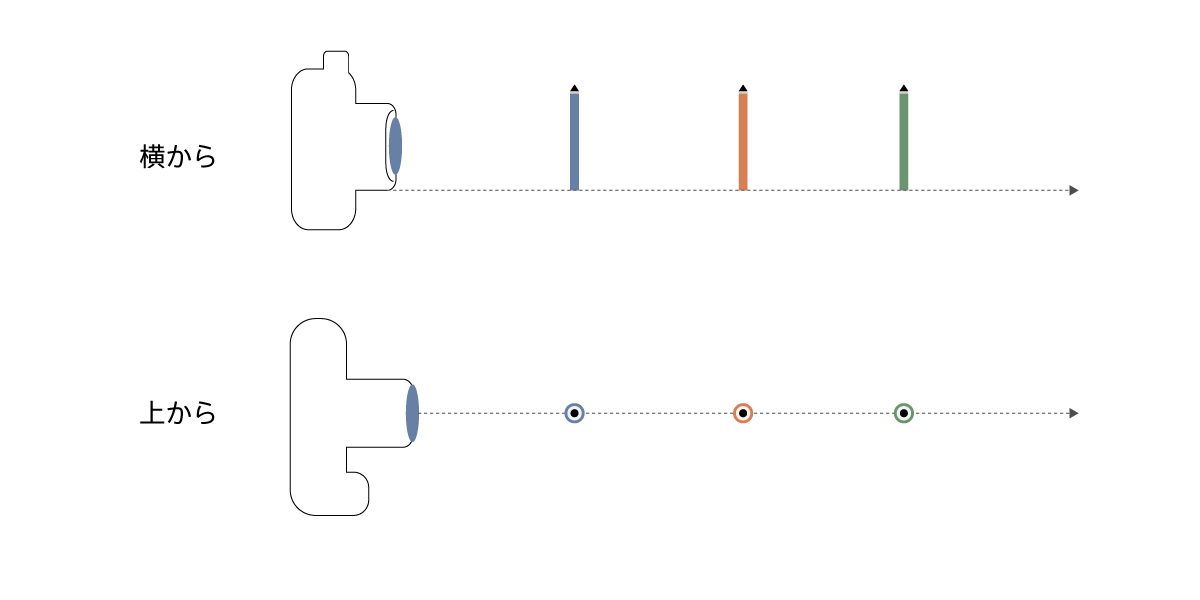
カメラと鉛筆を一直線に並べる。
ファインダーをのぞいて、一番手前の鉛筆で後ろの二つが鉛筆が隠れるように、位置を調整します。そしてカメラを回転させてみます。
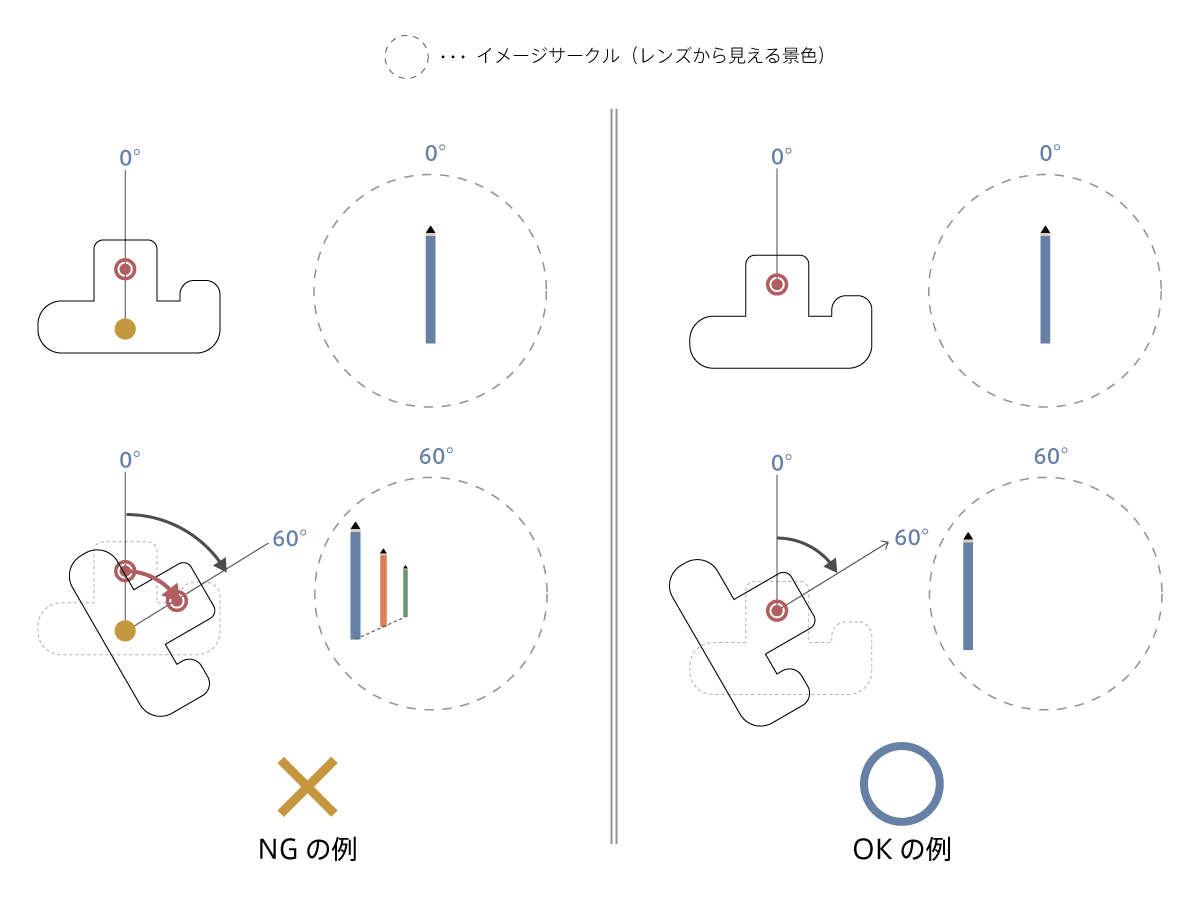
鉛筆の見え方が違っていないかを確認する。
左の図ではノーダルポイントの場所が動いてしまったため、角度を変えたときに隠れていたはずの奥の鉛筆が現れました。右の図のようにノーダルポイントが動かなければ、角度を変えても見えるものは変わりません。正面0°の時と同様、手前の青い鉛筆に隠れて後ろの2本は見えません。
上記は説明のための例えです。本当に鉛筆を並べたり、鉛筆のように小さい物体でノーダルポイントを確認するのは大変です。その場にあるものを利用して、ノーダルポイントを確認することになります。実際には、そこまで厳密に調整しなくても、5mm前後のずれの範囲であれば綺麗に合成(スティッチ)できると思います。
ノーダルポイントは、画像合成を行う際にとても重要なポイントです。例えば、いま発売されているVRカメラの多くには複数のレンズが付いています。複数のレンズがあるということは、ノーダルポイントも複数になります。撮影時それぞれのレンズは空間的に別の位置にあります。つまりそれぞれの映像には、ノーダルポイントのズレによる見え方の違いが必ず発生してしまうのです。この点は、360°VRの撮影で当面解決されない課題です。そのため撮影やポスプロの段階で、ノーダルポイントを意識した工夫も大切になります。
さて、魚眼レンズを装着しノーダルポイントを確認して、60°ずつ6角度・6枚の写真を撮影した場合、以下のサンプルのような素材になります。

360°VR画像(パノラマ写真)の元となる写真
上記はフルサイズのカメラと焦点距離10mmの魚眼レンズを使って撮影した素材です。これを合成して、1枚のエクレクタングラーを仕上げます。360°VR画像(パノラマ写真)の撮影では、ノーダルポイントの確認の他にもう一つポイントがあります。それはHDR(High Dynamic Range)撮影です。HDR撮影については、次回の記事で書きたいと思います。